



地址:吉林省长春市绿园区西新工业集中区集智路888号
电话:+86-0431-82003266
传真:+86-0431-82003277
网址:www.snl-rob.com
基于Interbus网卡的KUKA机器人网络配置介绍
随着工厂自动化的升级,原有的基于Interbus的网络逐渐被Profinet所替代,但是在很多地方还依然用着Interbus网络,在这里介绍一下老设备进行改造升级的时候(添加新的Interbus新设备)如何应用G4软件进行库卡机器人的网络配置。
一、Interbus配网软件IBS CMD G4软件的安装:
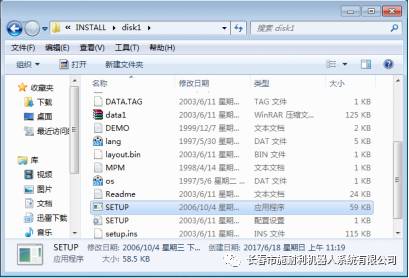
1.运行安装包裹中的disk1文件下的Setup应用程序:
2.等待安装初始化完成100%:
3.点击下一步进入安装:
4.关闭程序说明文件:
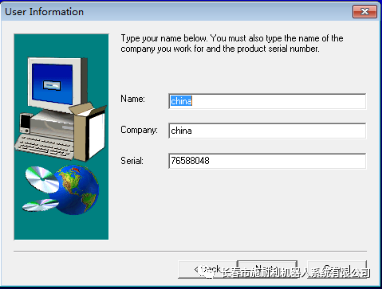
5.输入名字,公司,序列号(主要是输入序列号):
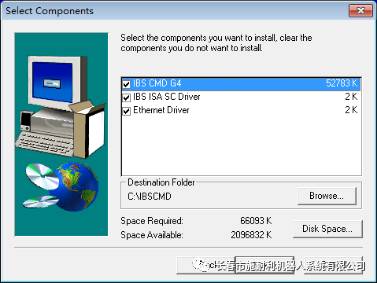
6.选择安装路径和安装的软件(默认即可):
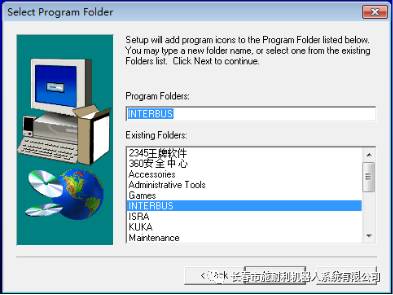
7.选择软件安装的文件夹:
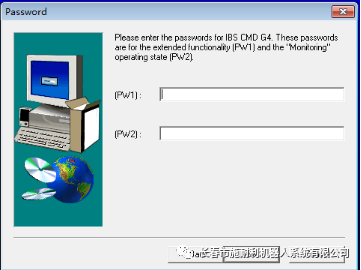
8.可以给软件进行密码设置(默认不设置密码):
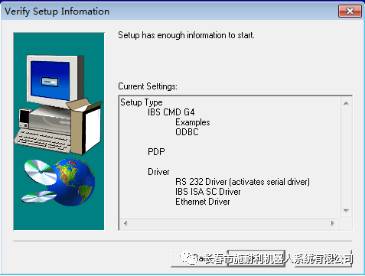
9.直接点击下一步正式开始安装:
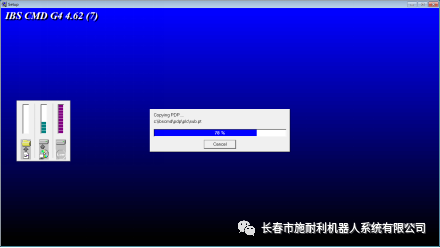
10.正式开始安装后左侧显示安装进度,可能要几分钟:
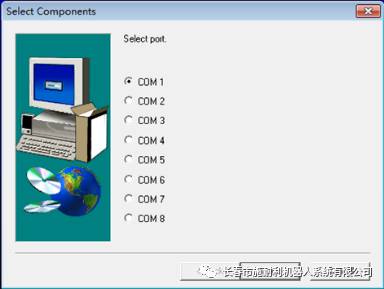
11.安装完毕后,提示选择COM口,默认即可(使用时根据实际需要进行选择):
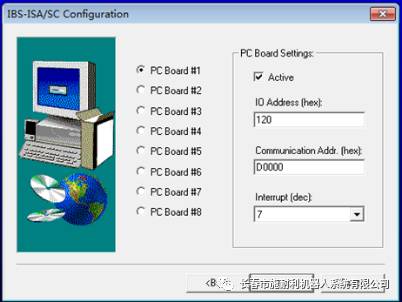
12.默认计算机板卡设置即可:
13.安装完毕后计算机需要重启:
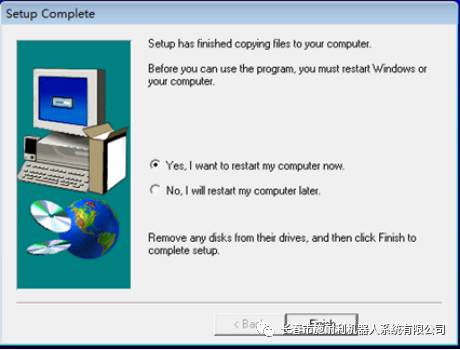
计算机重启完成后,软件的安装就结束了。
二、计算机同Interbus网卡进行连接:
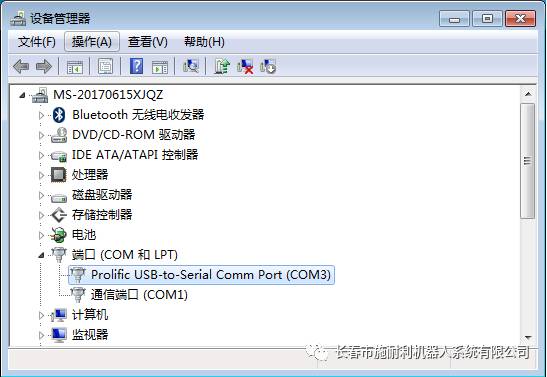
由于现在的计算机都没有配备串口接口,所以需要使用usb转COM口的转接线连接到Interbus网卡上,所以计算机上还要安装相应的usb转COM口转接线的驱动程序。
通过USB-COM口转接线将计算机同interbus网卡连接后,打开计算机上的设备管理器查看端口,可以看到计算机给当前接入的usb分配的是几号号通道(如图是通道3):
三、根据所用interbus网卡建立一个新项目:
1.打开IBS CMD G4软件,新建一个空项目并重命名

2.右击 网卡控制器会弹出网卡的选项菜单
网卡控制器会弹出网卡的选项菜单
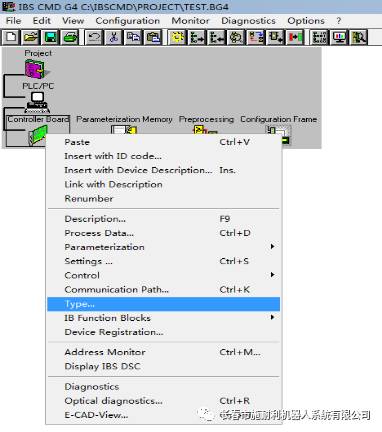
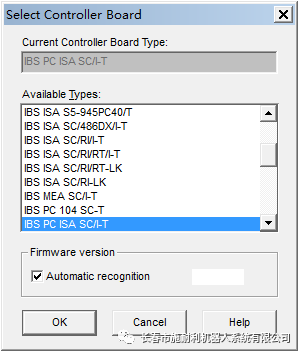
3.选择“Type... ”(网卡类型选择),按照实际所用网卡的型号进行选择(如图为IBS PCI SC/RI-LK),版本号勾选自动识别
4.选择“communication path”(连接路径),点击"YES"确认扩展功能范围,进入连接路径设置界面
在连接路径设置界面的基本设置菜单中(standard):
接口类型:选择序列口(默认的);
连接路径:选择当前计算机给usb接口分配的是序列口(前面已经在计算机的设备管理器中查看为COM3);
波特率:根据现场机器人实际的通讯标准定;
其他选项默认即可;

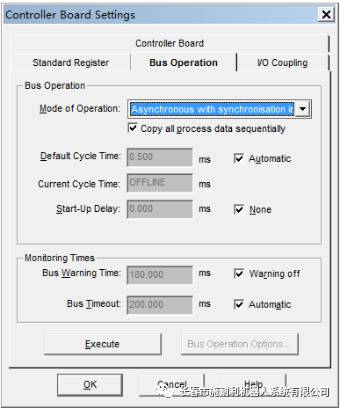
5.选择“seting”(设置),“Bus operation”子界面:
操作模式选择异步和同步脉冲模式;
其他默认勾选即可。
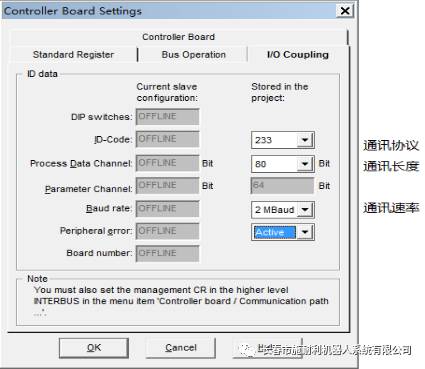
6.选择“seting”(设置),“I/O Coupling”输入输出匹配子界面:
通讯协议:有3/232/233/235四种可选,这要根据现场上位机的通讯协议来定,要同上位机的设置一致,否则无法同上位机通讯(如PLC);
通讯长度:也是由上位机来制定的,只需要保持一致即可;
通讯的波特率:按照现场设备的实际通讯模块进行选择;
其他默认即可;
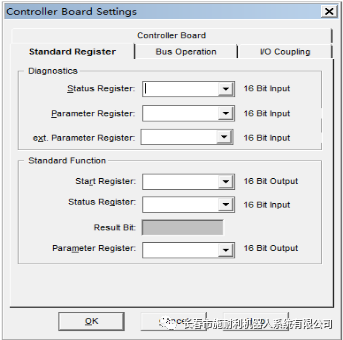
7.选择“seting”(设置),“standard register”标准记录子界面:
该界面主要是设置网络故障的诊断通讯位,可以不进行设置;
8.控制板设置完成后,点击主菜单界面的 控制板复位按钮,如果计算机同网卡通讯正常,则软件下方的状态显示框会提示在线。
控制板复位按钮,如果计算机同网卡通讯正常,则软件下方的状态显示框会提示在线。

通讯正常后,基本上机器人作为从站同PLC通讯的配置已经完成,下面介绍机器人为主站如何同子站模块进行网络配置和通讯起始地址的分配。
有两种方式,一种是在线配置,另外一种是离线配置。
四、在线配置机器人的子站:
1.右击存储卡 选择格式化,将板卡中存储的网络配置信息删除,然后点击
选择格式化,将板卡中存储的网络配置信息删除,然后点击 对控制器板卡进行复位
对控制器板卡进行复位

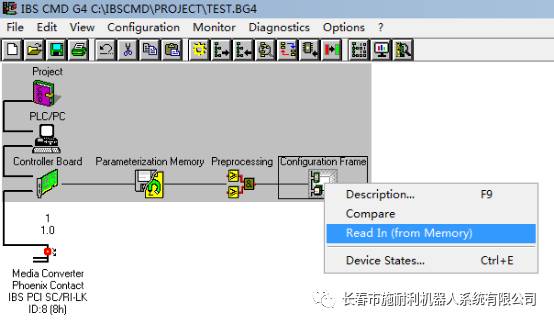
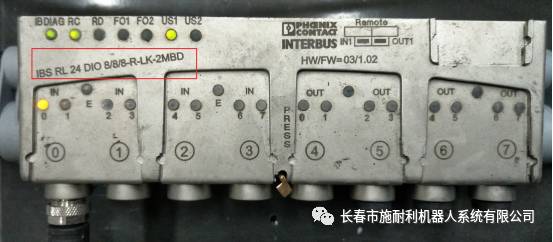
2.右击 按钮选择读取,如果通讯正常则软件的拓扑图会依次显示网络中能够正常通讯的模块:
按钮选择读取,如果通讯正常则软件的拓扑图会依次显示网络中能够正常通讯的模块:
所谓正常通讯需要模块24V US1电源接通、光纤连接正常、模块通讯的波特率一致(都为500K或者2M)。
3.所有正常连接的模块都会在界面上显示(如果某个模块通讯故障,则该模块以后的模块都不会被扫描到),这样扫描到的模块只有通讯位长度和id号这两样基本信息,没有模块的具体描述(如生产厂家、型号、名称等,库卡机器人配网可以不需要这些信息,所以我们不用添加)。
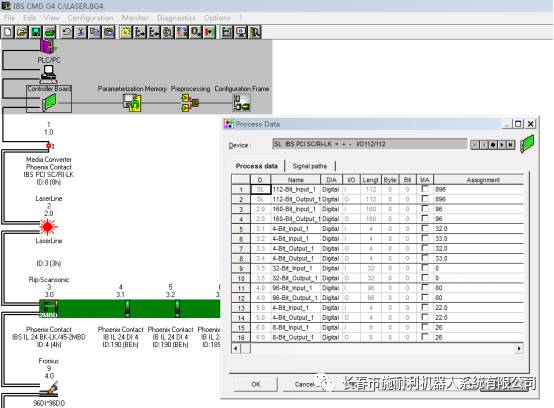
4.所有模块都通讯正常后,右击 ,选择过程数据“process data”,对每个模块进行通讯起始地址的分配包括同PLC的通讯,需要注意的是:如果该模块是16的整数倍的模块,则起始地址只能为偶数不能为奇数,如果是8位的模块则可以随便分配(地址的分配要根据模块通讯长度来定,具体的起始地址则由现场的通讯标准来定),其他通讯小于8位的模块则可以随便定;
,选择过程数据“process data”,对每个模块进行通讯起始地址的分配包括同PLC的通讯,需要注意的是:如果该模块是16的整数倍的模块,则起始地址只能为偶数不能为奇数,如果是8位的模块则可以随便分配(地址的分配要根据模块通讯长度来定,具体的起始地址则由现场的通讯标准来定),其他通讯小于8位的模块则可以随便定;
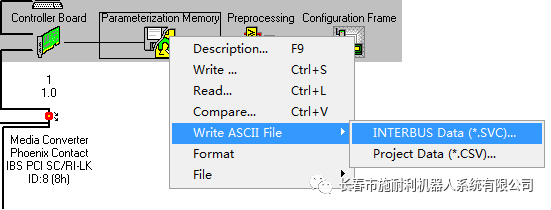
5.进程数据设置完毕后,点击 ,右击存储卡
,右击存储卡 ,选择"Write"将网络配置信息写入板卡控制器,再选择“Write ASCII File”生成.SVC文件。
,选择"Write"将网络配置信息写入板卡控制器,再选择“Write ASCII File”生成.SVC文件。
6.将生成的SVC文件拷贝到kuka机器人C\KRC\Roboter\Config\User\Common目录下(这是C4机器人路径,C2略有不同),然后对机器人的输入输出进行重新配置,配置文件就选择导入的SVC文件名。

至此,机器人就能够与上位机PLC和子站模块进行通讯了。
五、离线配置机器人的子站:
所谓离线配置就是事先知道网络模块的连接情况及各模块的型号,直接在IBS CMD G4软件上构建网络结构,然后生成SVC文件,在直接将SVC文件拷贝到机器人中:
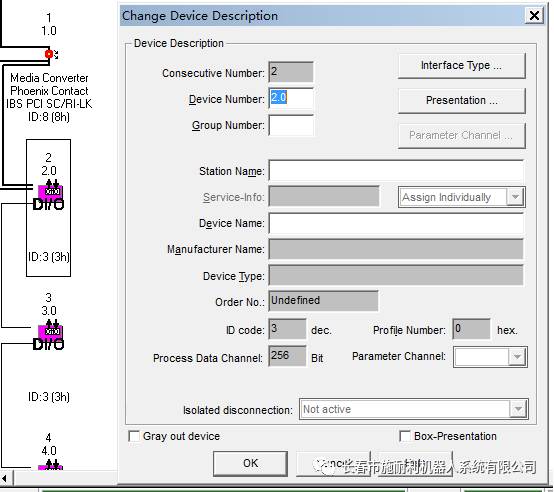
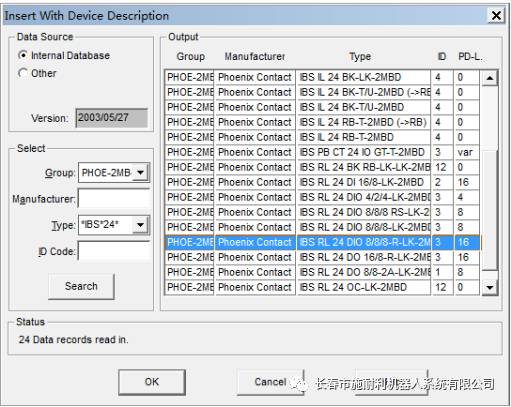
1.同在线配置相同,同PLC通讯的设置完成后,右击 选择插入设备描述,通过搜索选项可以通过模块的组、制造商、类型、ID code进行分类搜索,如下图常用的模块8入8出模块:
选择插入设备描述,通过搜索选项可以通过模块的组、制造商、类型、ID code进行分类搜索,如下图常用的模块8入8出模块:
2.可以对模块进行命名或者分组(在带换抢盘的机器人需要进行工具切换时需要分组)
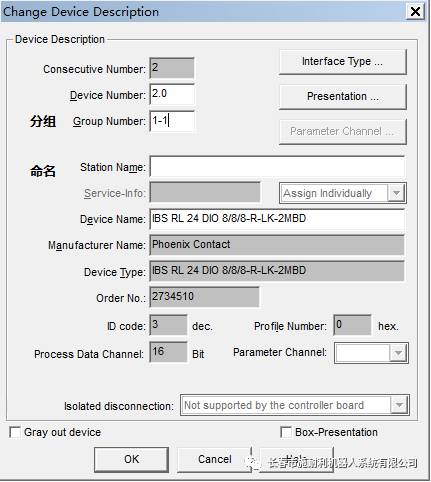
依次按照电气图纸模块的连接顺序添加模块说明文件,再进行进程数据的分配(模块通讯的起始地址),最后生成.SVC文件,拷贝到机器人中,由机器人读取SVC文件进行网络配置。
六、对机器人Interbus网络通讯质量进行监控:
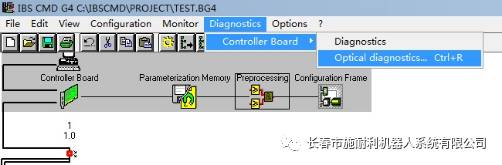
1、网络配完后,对网络通讯质量进行监控,检查光纤通讯质量,如图依次选中菜单“Diagnostics”、“Controller Board”、“Optical diagnostics”选项
2、选中菜单“Read In”、“Current Values”就可以监控当前通讯质量
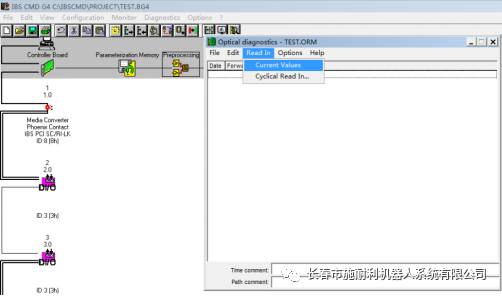
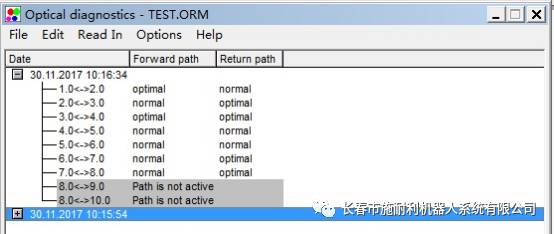
3、当前光纤到各个模块的通讯质量会显示在列表中:
optical control is not active 光纤通讯未激活
normal 通讯质量正常
optimal 通讯质量较佳
path is not active 该模块网络成断开状态
源:施耐利机器人部

