



地址:吉林省长春市绿园区西新工业集中区集智路888号
电话:+86-0431-82003266
传真:+86-0431-82003277
网址:www.snl-rob.com
KUKA机器人基础_S_T的原理
众所周知,KUKA机器人记录位置的方式为当前工具在当前基坐标下的位置,那么同样的坐标下,机器人的姿态是否唯一呢?
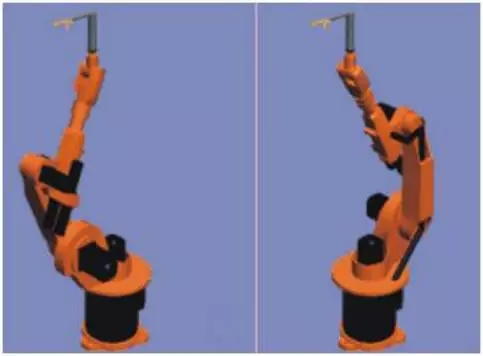
图1-1
如图1-1所示:TCP 位置 (X, Y, Z) 和姿态 (A, B, C)的数值不足于明确规定机器人的位置,因为虽然 TCP 相同,但轴的位置仍可能有多个。
机器人姿态完全不同,但是所显示的坐标值完全一样。或者机器人6轴旋转360°,机器人位置坐标一样,但是轴的位置不一样。
KUKA机器人通过状态S(STATUS)和转动方向T(TURN)的值来在多个可能的轴位中确定一个唯一的位置。TCP 相同,轴位置不同
状态 (S) 和转角方向 (T) 是数据类型 POS 和 E6POS 的组成部分:
STRUC POS REAL X, Y, Z, A, B, C, INT S, T
STRUC E6POS REAL X, Y, Z, A, B, C, E1, E2,E3, E4, E5, E6, INT S, T
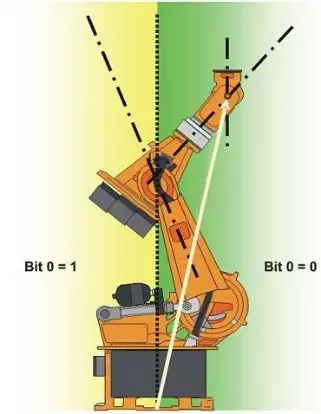
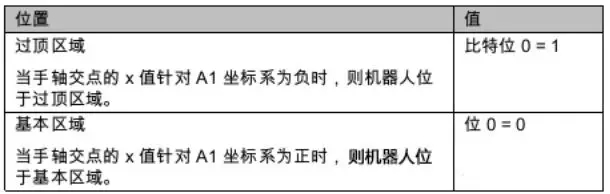
S: 用状态 (STATUS) 参数可防止轴的位置多义。
位 0:给出手轴(A4、A5、A6)交点的位置。
位1:给出轴3的位置。比特位1值改变时对应的角取决于机器人类型。

位 2:给出轴 5 的位置。

比特位3未用,始终为 0。
位4:说明是否用一台绝对精确的机器人对点进行示教。(一般不用)
总结:
S 主要是轴的状态反馈,也可进行更改,它反映的是机器人空间上一点的各个轴的状态,因为机器人的XYZABC只能反映空间上点的工具的姿态,还需要确定各个轴的位置状态. 及0位手轴456与1轴的位置关系,1位是3角度变化,2位是5的角度变化.
T: 利用转角方向 (TURN) 参数确认轴的状态。
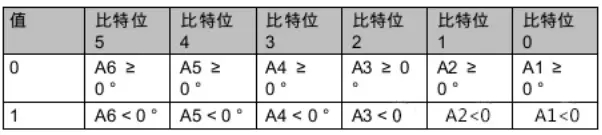
总结: T反映的是机器人各个轴的角度状态.
由S和T来共同确定机器人空间上任意点的机器人自身的姿势.
这样由XYZ确定空间上点的位置,ABC确定机器人所带工具的姿势,由S、T值来确定机器人的姿势,以此机器人在空间上任意点的状态被完全的展示出来。
例:
DECL E6POS P0 = {X 511.8292, Y -328.0844, Z 1822.889, A 3.381102, B 54.23166, C 123.3221, S 2, T 34, E1 0.0, E2 0.0, E3 0.0, E4 0.0, E5 0.0, E6 0.0}
S 2 转化为二进制为10机器人的手轴456 在X方向正方向,3轴的角度为大于0度。
T 34 转化为二进制为100010轴1、6<0度,其余轴在大于0度。
——施耐利培训部

